

摘要:,,本文介绍了切割机器人的编程方式。通过详细解析编程过程,涵盖了机器人的基本编程语言和工具,以及切割工艺参数的设置和调整。文章还探讨了编程中需要注意的关键点和优化建议,帮助读者更好地理解和应用切割机器人的编程技术。通过编程,可以实现机器人自动化、高效、精确的切割作业,提高生产效率和产品质量。
本文目录导读:
随着科技的快速发展,切割机器人在工业制造领域的应用越来越广泛,切割机器人是一种能够自动完成物料切割作业的智能设备,其编程方式直接影响到机器人的工作效率和切割精度,本文将详细介绍切割机器人的编程方式,帮助读者更好地了解和使用切割机器人。
切割机器人编程方式概述
切割机器人的编程方式主要包括示教编程、拖拽编程、文本编程和图形化编程等,不同的编程方式具有不同的特点,适用于不同的应用场景。
1、示教编程:通过手动操作机器人进行示范,使机器人学习并复制示范动作,这种方式简单易行,适用于对精度要求不高的场景。
2、拖拽编程:通过计算机图形界面,直接拖拽的方式设定机器人的运动轨迹和切割参数,这种方式直观易懂,适合初学者使用。
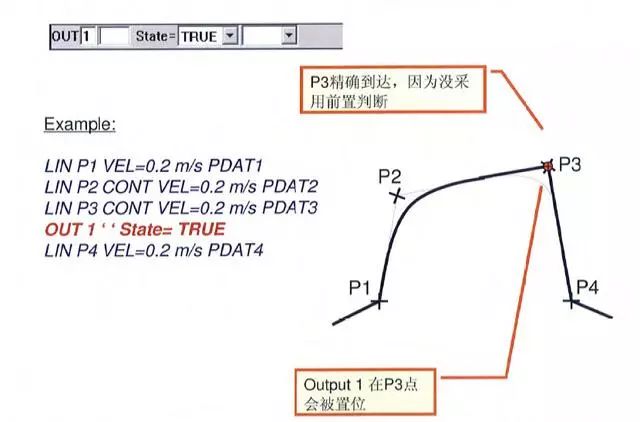
3、文本编程:通过编写代码设定机器人的运动控制、切割参数等,这种方式需要具备一定的编程基础,适用于复杂场景和高级用户。
4、图形化编程:将复杂的文本编程转化为直观的图形界面,通过拖拽、连接等方式创建程序流程,这种方式结合了示教编程和文本编程的优点,易于学习和使用。
切割机器人编程步骤
无论采用何种编程方式,切割机器人编程的基本步骤大致相同,主要包括以下几个步骤:
1、确定任务需求:明确切割机器人的工作任务和目标,如切割材料、切割精度、工作环境等。
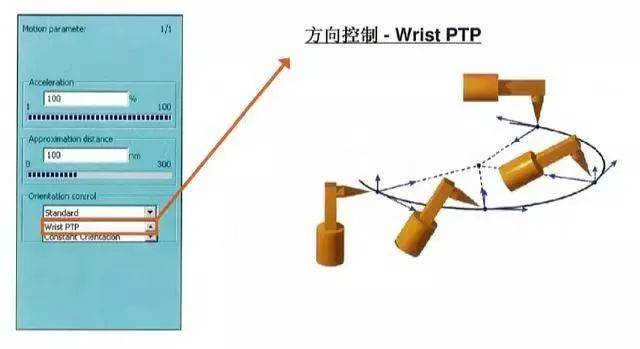
2、设计运动轨迹:根据任务需求,设计机器人的运动轨迹,这一步可以通过示教、拖拽或图形化编程完成。
3、设定切割参数:根据材料特性和切割要求,设定机器人的切割速度、切割深度等参数。
4、编写程序代码:根据运动轨迹和切割参数,编写机器人的控制程序,这一步可以通过文本编程或图形化编程完成。
5、程序调试与优化:将编写好的程序上传至机器人,进行试运行和调试,确保机器人能够按照预设的任务要求完成切割作业。
6、实时监控与调整:在机器人运行过程中,实时监控机器人的工作状态和切割质量,根据实际情况进行调整和优化。
不同编程方式的适用场景
1、示教编程:适用于对精度要求不高的简单切割任务,如物料分拣、简单形状切割等。
2、拖拽编程:适用于初学者和中等复杂度的切割任务,如中等精度的零件切割等。
3、文本编程:适用于高级用户和复杂场景,如高精度、高速度的切割任务,以及需要实现特殊功能的情况。
4、图形化编程:适用于广大用户群体,特别是非专业用户,能够快速上手并完成各种切割任务。
注意事项
1、在进行切割机器人编程时,要确保机器人工作环境的安全,避免意外事故发生。
2、在编写程序时,要注重程序的逻辑性和可读性,以便于后期的调试和维护。
3、在进行程序调试时,要逐步检查机器人的运动轨迹和切割参数,确保机器人的运行精度和稳定性。
4、在机器人运行过程中,要实时监控机器人的工作状态,发现问题及时处理。
切割机器人的编程方式多种多样,选择合适的编程方式可以提高机器人的工作效率和切割精度,在实际应用中,应根据任务需求、用户技能和场景特点选择合适的编程方式,在编程过程中要注意安全和程序质量,确保机器人的稳定运行和切割质量。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...